news
Paper Recognized for Enduring Contributions to Robotics
Primary tabs
Frank Dellaert, a professor in the Georgia Institute of Technology’s College of Computing, will receive the Association for the Advancement of Artificial Intelligence (AAAI) Classic Paper Award in February at AAAI 2017 in San Francisco, Calif.
The award will recognize his work on the Monte Carlo Localization algorithm in an AAAI 1999 paper, Monte Carlo Localization: Efficient Position Estimation for Mobile Robots. In addition to Dellaert, co-authors on the paper included first author Dieter Fox, Wolfram Burgard, and Sebastian Thrun.
Monte Carlo Localization was first presented in 1999 at the International Conference on Robotics and Automation. Dellaert—along with co-authors Burgard, Fox, and Thrun—developed the algorithm while he was a graduate student at Carnegie Mellon. It recognizes the utility of particle filters for localization tasks and applies it to a variety of robots and sensor suites on this and two other papers in the same year.
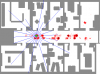
The algorithm is a sampling-based robot localization method that is now a standard in robotics and taught all over the world. It uses a particle filter to represent the distribution of likely states, with each particle representing a hypothesis of where the robot is. It begins with a uniform random distribution of particles over the configuration space, assuming that it is equally likely to be at any point in space.
As the robot moves, it shifts the particles to predict its new state after the movement. When the robot senses something, the particles are resampled and eventually converge toward the actual position of the robot.
Dellaert said he was honored to be recognized for the work with the AAAI Classic Paper Award.
“It’s a tremendous honor, especially in an era where AI is again at the forefront of so many recent technological advances,” he said.
He added that the impact of the Monte Carlo Localization algorithm was somewhat unexpected and credited his collaborators, particularly Fox, with much of its success.
“Its unexpected impact was partly due to being able to work with amazing collaborators at the time, especially Dieter Fox, who was the first author on this particular paper,” he said. “But the algorithm is also very easy to implement and it visualizes the knowledge the robot possesses about its location, both of which I’m sure added to its appeal among robotics students everywhere.”
Summary
Status
- Workflow status: Published
- Created by: David Mitchell
- Created: 01/27/2017
- Modified By: David Mitchell
- Modified: 02/01/2017
Categories
Keywords
User Data